publications
Let there be light.
First / Co-first Author
2026

2025
2024
2023

Other Contributions
2026
2025

2024
-
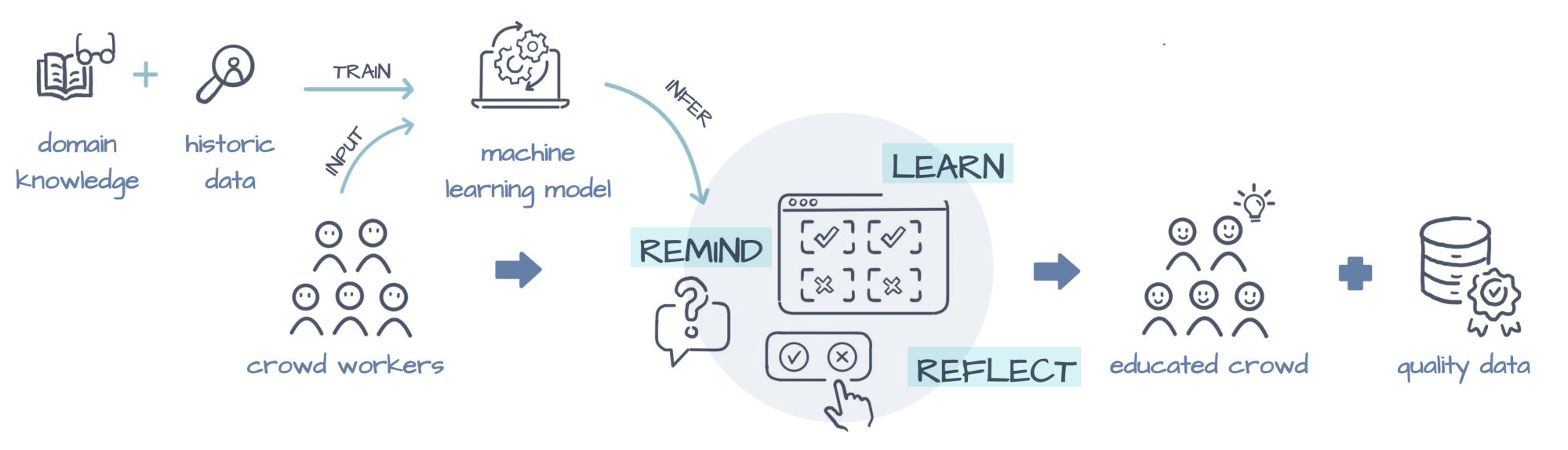 LabelAId: Just-in-time AI Interventions for Improving Human Labeling Quality and Domain Knowledge in Crowdsourcing SystemsIn Proceedings of the CHI Conference on Human Factors in Computing Systems 2024
LabelAId: Just-in-time AI Interventions for Improving Human Labeling Quality and Domain Knowledge in Crowdsourcing SystemsIn Proceedings of the CHI Conference on Human Factors in Computing Systems 2024
2022
-
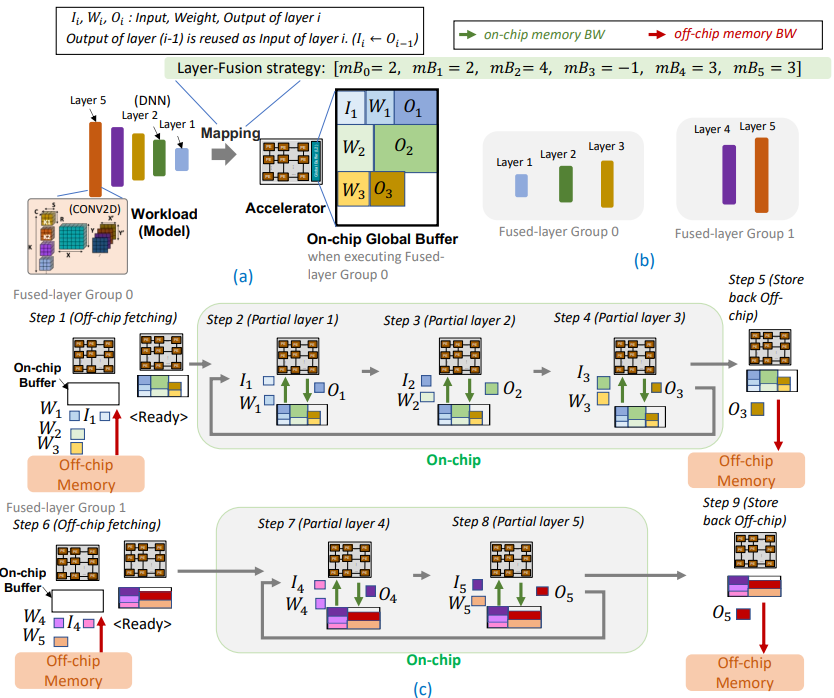 DNNFuser: Generative Pre-Trained Transformer as a Generalized Mapper for Layer Fusion in DNN AcceleratorsarXiv preprint arXiv:2201.11218 2022
DNNFuser: Generative Pre-Trained Transformer as a Generalized Mapper for Layer Fusion in DNN AcceleratorsarXiv preprint arXiv:2201.11218 2022